Pojazd inspekcyjny przystosowany do poruszania się w różnorodnym środowisku
- mała wysokość poniżej 50mm,
- niskie opory toczenia po powierzchniach gładkich,
- alternatywny napęd w sytuacji poruszania się po nierównej powierzchni,
- szeroki kąt rejestracji i obserwacji otoczenia,
- możliwość rejestracji parametrów środowiska
- szerokie możliwości rozwoju i adaptacji do różnych wymagań/zastosowań
Konsekwencją postawionych wytycznych było zastosowanie konkretnych rozwiązań konstrukcyjnych.
W pierwszej kolejności postawiono nacisk na redukcję wymiarów gabarytowych i masy pojazdu. Z tego względu kierowano się wyborem jak najmniejszych podzespołów. Ponad to przy projektowaniu i rozmieszaniu elementów ściśle ograniczono się do konkretnych wymiarów zewnętrznych. Umożliwiło to uzyskanie pojazdu o zwartej budowie z minimalną ilością niepotrzebnej przestrzeni. Kluczowym elementem w tym aspekcie była płyta pojazdu, która odpowiadała za zapewnienie wszystkim podzespołom odpowiedniego położenia. Przewidziano w niej mocowania elementów elektronicznych tj. mikroprocesora, silników, baterii oraz elementów odpowiadających za poruszanie się pojazdu czyli prowadnic wałów giętkich i osi kół. Dopełnieniem wyglądu zewnętrznego pojazdu była obudowa, której zadaniem było zabezpieczenie elektroniki przed trudnymi warunkami oraz nadanie całemu pojazdowi spójnego i atrakcyjnego wyglądu. Przy jej projektowaniu należało przewidzieć rozmieszczenie czujników i sensorów, będących wyposażeniem robota. Istotny był również sposób łączenia płyty podłogowej wraz z obudową, w tym celu przewidziano rowek uszczelniający poprowadzony na obwodzie płyty oraz odpowiednie mocowania wyprowadzone z obudowy.
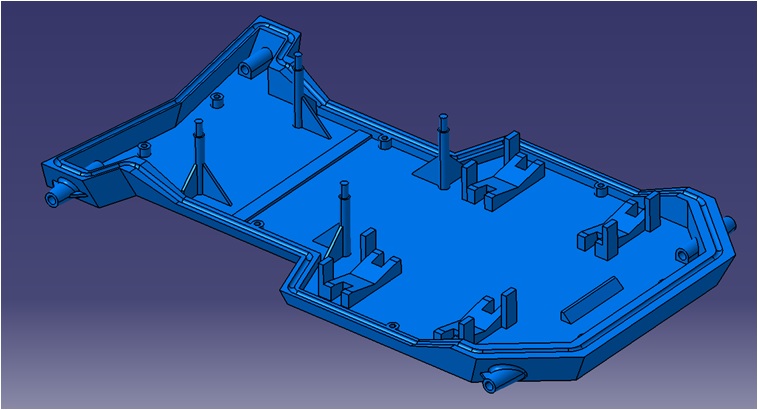
Rys. 1 Płyta podłogowa pojazdu
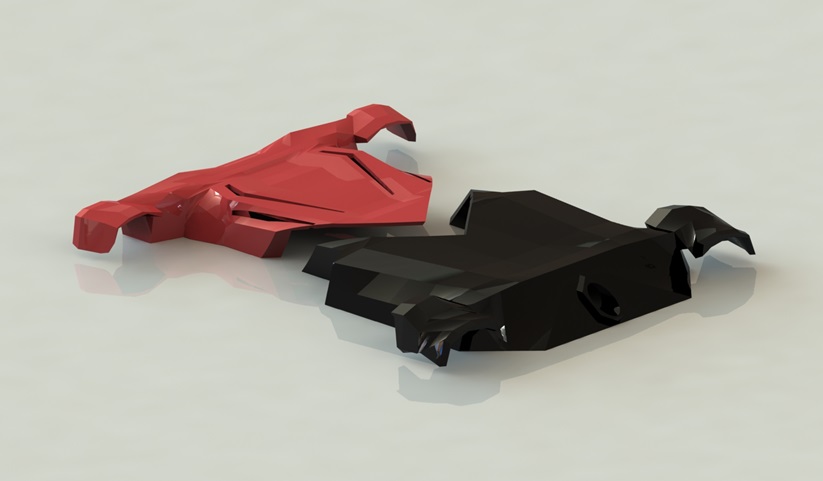
Rys. 2 Obudowa pojazdu
W kwestii zapewnienia pojazdowi wymaganej mobilności zdecydowano się wykorzystać hybrydowy napęd łączący cechy kół jezdnych oraz gąsienic. W przypadku, gdy robot pracuje na powierzchni płaskiej wykorzystywane są koła jezdne, które charakteryzują się niskimi oporami toczenia. Natomiast w sytuacji, gdy pojazd będzie musiał pokonać przeszkodę w postaci nierówności wykorzystany zostanie napęd gąsienicowy. Skręcanie pojazdu jest analogiczne jak w przypadku czołgów, aby więc było to możliwe zastosowano dwa silniki, które napędzają dwie strony pojazdu. Moment obrotowy z silników jest przenoszony za pomocą wał giętkich do przednich kół pojazdu. Dalej za pomocą przekładni pasowych (będących również gąsienicami) moment jest przenoszony na tylne, bierne osi.
Do obserwacji i analizy środowiska w którym będzie wykorzystany robot przewidziano kamerę szerokokątną tzw. rybie oko oraz czujniki m. in. do pomiaru wilgotności i temperatury powietrza. Wszystkie elementy pojazdu zespala platforma komputerowa Raspberry Pi. Służy ona do przetwarzania zebranych informacji oraz sterowania silnikami pojazdu. Istotną cechą tego mikroprocesora jest zainstalowany moduł Wi - Fi umożliwiający bezprzewodowe sterowanie pojazdem. Dodatkowym autem tego urządzenia jest liczba elementów dedykowanych przez producenta, które w przyszłości mogłyby zostać wykorzystane w pojeździe.
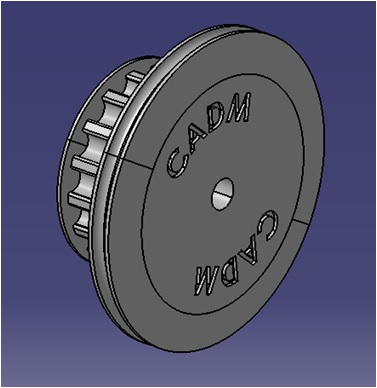
Rys. 3 Koło jezdne z zintegrowanym kołem pasa zębatego
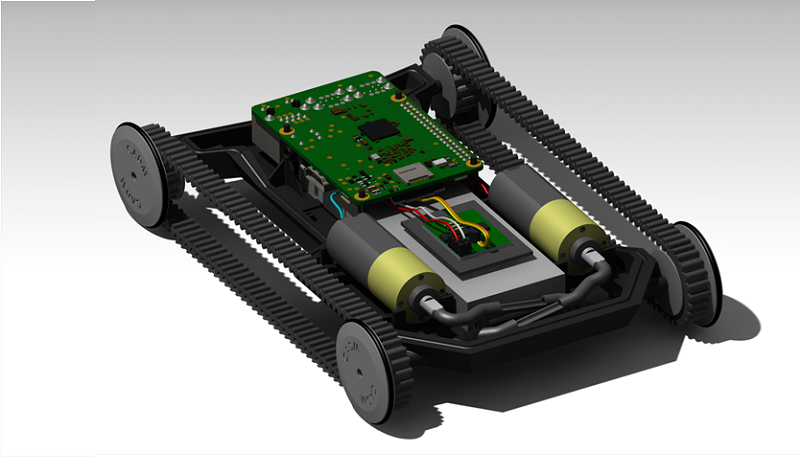
Rys.4 Rozmieszczenie podzespołów, rozwiązanie napędu
W większości wykorzystane elementy pojazdu są artykułami dostępnymi w handlu. Pozostałe elementy konstrukcyjne oraz obudowa zostały wykonane w technologii przyrostowej FDM. Docelowo jednak projekt zakłada wytworzenie podwozia pojazdu metodą selektywnego spajania proszków.
Pomysłami na rozwinięcie projektu są:
- układ sensorów pozwalający na autonomiczną pracę
- stworzenie wariantu o całkowitej szczelności obudowy
- diody oświetleniowe
- zastosowanie spirometrycznego pomiaru temperatury
- układ do pobierania próbek
- obudowa odporna na fale elektromagnetyczne (np. pomieszczenia generatorów)
W zależności od stworzonego w przyszłości wariantu możliwe będzie wykorzystanie pojazdu do:
- Inspekcja przestrzeni pod podłogą serwerowni
- Badania podwozi samochodów ciężarowych
- Okresowe badania spodu maszyn
- Inspekcja maszynowni okrętowej
- Penetracji wszystkich obszary trudno dostępnych w szczególności mających szkodliwy wpływ na ludzkie zdrowie
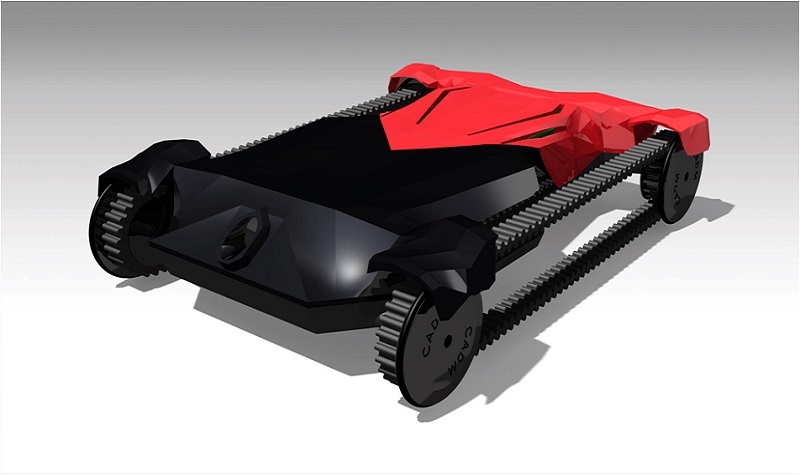
Rys 5. Gotowy model pojazdu